随着科技的不断创新发展,智能汽车已逐渐走进我们的生活,无图智驾技术作为其重要组成部分备受关注。该技术通过传感器和人工智能算法实现自动驾驶,具有极大的潜力,然而在实际运用中难免存在安全隐患。本文将深度探讨智能汽车的无图智驾技术及其安全性评估,旨在为智能汽车的发展提供一定的参考和指导。
智能汽车无图智驾:模仿人类驾驶的选择智能汽车无图智驾的核心是重感知,轻地图。通过模仿人类本身的驾驶行为,实现依据路况随机应变的驾驶,但这也意味着无图智驾要达到人类这样的感知信息处理控制执行还是很难的。目前无图智驾的路线主要有激光雷达路线和毫米波雷达+视觉融合路线。特斯拉坚持纯视觉路线,国内新势力则在大胆推进无图智驾,但无图智驾是被逼无奈的、退而求其次的选择。其最重要的原因在于高精地图的获取方方面面的掣肘太多了,比如权限和数据量,所以无图智驾需要通过演化来逐步提高安全性和行驶体验。在路线落地过程中,各自有各自的演化。特斯拉坚持纯视觉路线,这是因为人类就是纯靠视觉开车的,但这也容易被打脸。而国内新势力则在大胆推进无图智驾,以理想、华为等为例,已经开始分批次投放,打通高速到城市道路场景。但实际上,在高精地图覆盖的区域使用高精地图,而在无高精地图覆盖的区域则阉割部分功能以确保安全。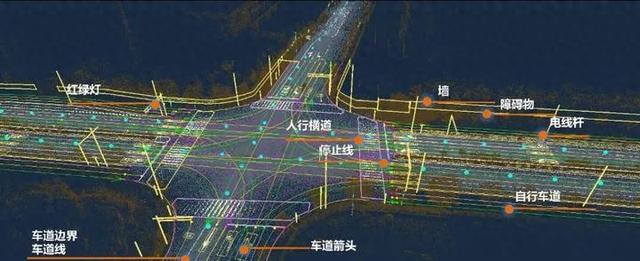
这是因为无图智驾的安全性及行驶体验安心感等不如有图(高精地图)加持的有图智驾。高精地图的获取方面存在多方面的掣肘,这使得无图智驾成为了一个被逼无奈的、退而求其次的选择。比如,我国仅开放了六座城市的高精地图采集权限,想要实现全高精地图加持是很难的。而高精地图获取数据量极大,这导致高精地图更新频率最短也要以季度为单位计算。因此,无图智驾需要通过演化来逐步提高安全性和行驶体验。总之,虽然无图智驾是被逼无奈的、退而求其次的选择,但其模仿人类本身的驾驶行为,实现依据路况随机应变的驾驶,依然具有一定的优势。未来,随着技术的不断进步和演化,无图智驾的安全性和行驶体验或将逐步提升。那么,你对于智能汽车无图智驾的发展前景有何看法?高精地图对于自动驾驶技术的发展至关重要。然而,由于采集难度大、数据实时性要求高、国家安全政策等原因,企业获取高精地图资质相对有限,也存在资源共享的壁垒。
因此,无图智驾成为各大车企的选择。但是,有图(高精地图)加持的有图智驾在安全性和行驶体验方面更胜一筹。高清地图对于智能驾驶的三大决策模块提供了支持,包括环境感知和精确定位、决策与规划以及执行辅助。高精地图提供更高的精度和更丰富的特征,包括车道层、设施层、关联层、定位层和动态层。因此,高精地图是实现更高级别的无人驾驶技术的关键因素。在全自动驾驶的路上还有许多挑战,但吾辈汽车人仍需努力。传统地图的道路只能用一条连接线表示,而高精地图则包含了车道数、车道宽度、车道线类型颜色、曲率、坡度等更加丰富的信息。高精地图还包括五个图层,包括车道层、设施层、关联层、定位层和动态层。这些特征使得高精地图在环境感知和精确定位、决策与规划以及执行辅助方面更加出色。例如,在恶劣天气下,高精地图可以帮助车辆感知周围环境,减少计算资源的浪费。
在规划和决策方面,高精地图可以提前了解更高精度的交通和道路状况,指导车辆安全通行。在执行辅助方面,高精地图可以提供更多的信息,使得车辆的动力和制动分配更加主动和准确。然而,高精地图的采集难度大,数据实时性要求高,国家安全政策等原因掣肘。因此,有高精地图采集资质的企业相对有限,相互之间又有资源共享的壁垒。这些因素导致发展无图智驾成为各大车企被逼无奈、退而求其次的选择。虽然无图智驾具有一定的安全性和行驶体验,但是与有图智驾相比,仍有一定的差距。在全自动驾驶的路上,仍然存在很多挑战和困难。目前,即使是在有高精地图支持的情况下,实现低延迟的规控算法运行也是非常困难的。因此,全自动驾驶的发展需要更多的技术支持和政策保障。政府可以制定更加明确的地图采集政策和标准,鼓励企业加强资源共享和合作,提高地图数据的质量和精度。同时,车企也需要加强技术研发和创新,提高智能驾驶技术的稳定性和可靠性。
只有这样,才能让全自动驾驶技术真正走向成熟,为人类带来更多的便利和安全。
以上就是深度探讨智能汽车的无图智驾技术及安全性评估的相关介绍,希望能对你有帮助,如果您还没有找到满意的解决方式,可以往下看看相关文章,有很多深度探讨智能汽车的无图智驾技术及安全性评估相关的拓展,希望能够找到您想要的答案。